Lens
Introduction



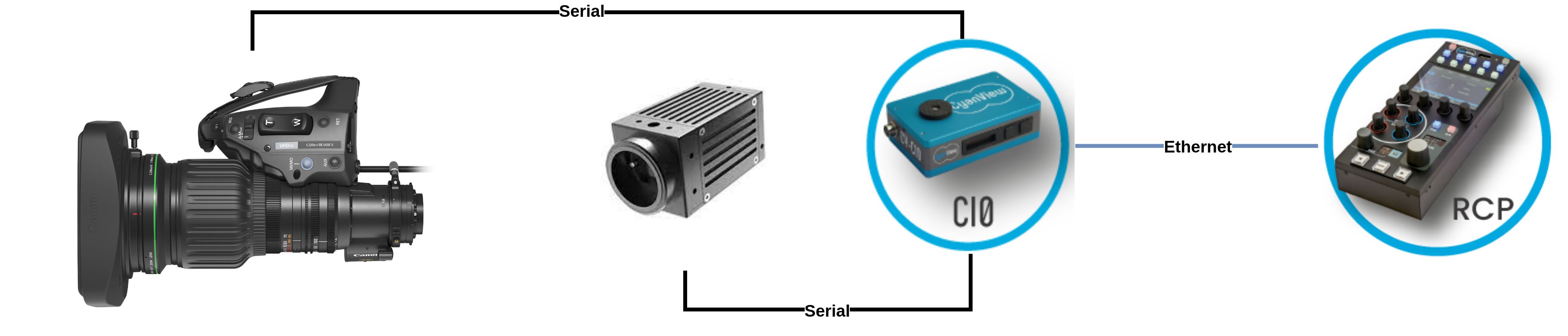
The goal is to setup a lens control in parallel of the camera control.
Use case:
- when the camera cannot control the lens
- the lens is not compatible (FX9 + cabrio lens) with the camera
When changing:
- iris/zoom/focus, we will send it to the lens
- shading, we will send it to the camera and it is transparent for the vision engineer on the RCP.
Lens compatibility
Specialty : B4 ENG
For specialty and robotic application, you can have a look at this guide
Cine/Photo lens

If you have a motorised cinema lens, you can follow this guide
Compatible with:
- Canon : using 12P port (digital)
- Fujinon : using 20P or 12P (digital)
- cmotion : using 12P port (ditial)
If you have a Canon photo lens (18-80 mm), it is motorised, but has only the 20P analog port that only allows control of zoom/focus. If you want remote iris control, you need to use external motor (cmotion, Tilta, ARRI, etc.)
Prime lens/Non motorised lens or robotics
The same way we control the lens, we can control external motors:

On this picture, you see a Canon 17-120 mm, that is normally controllable using 12P digital connector. But this port was already used by the ARRI AGITO operator (for zoom/focus). So here, they used a tilta motor to get iris control from the RCP in the CCU room.
Cables
- Lens controlled by camera : nothing to do, we control the lens using the camera protocol
- 2/3" B4 : CY-CBL-6P-B4-01
- Canon Cine Servo (12P digital): CY-CBL-6P-B4-01
- Fujinon Cabrio (20P digital) : CY-CBLL-6P-FUJI-02 + CY-CBL-6P-B4-01
- Other (non motorised, prime lens, etc.) : Tilta motors with CY-CBL-TILTA-SERIAL
As lenses are critical, we recommend to use RIO LAN or RIO WAN instead of CI0.
CI0 is a slave device and if you remove the ethernet cable, the lens is not controlled anymore and will then "close" (iris).
While a RIO has all the protocols builtin and can control the lens on its own without any ethernet/RCP. It also allows to plug handles, USB accessories, etc.