Futaba S.BUS
S.BUS is a protocol created by Futaba, to control servos motor. Some gimbal or pan/tilt heads can be controlled by S.BUS
Configuration
Bus creation
To use S.BUS, a Futaba: S.BUS bus must be created. In the Features section, add a Futaba: S.BUS :

Once the bus is created, click on the newly Futaba S.BUS block to configure the bus. Then, choose your CI0 or RIO in the Interface: Port drop-down list:
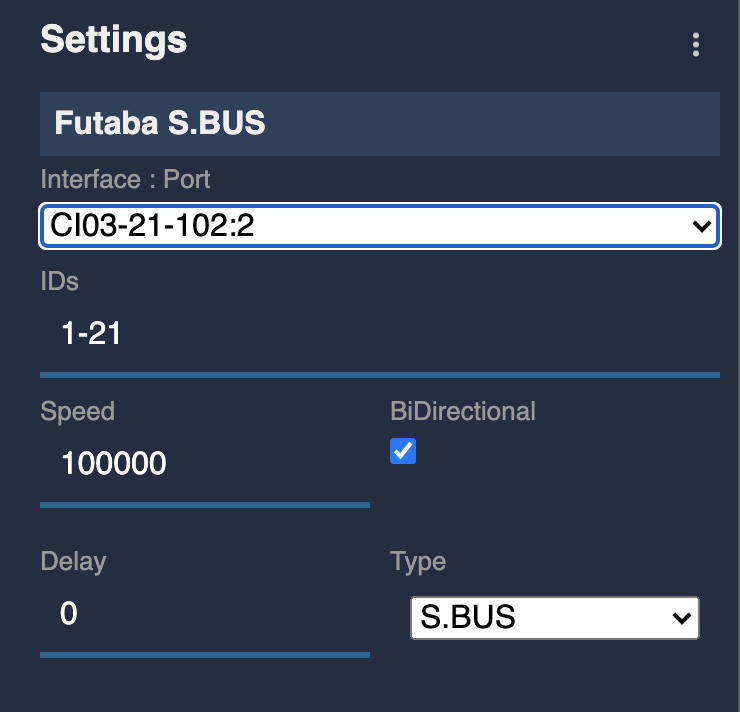
The default settings should work with most S.BUS configurations. In the case of a special S.BUS device, the bus speed, duplexing or IDs can be changed from this configuration panel.
S.BUS device configuration
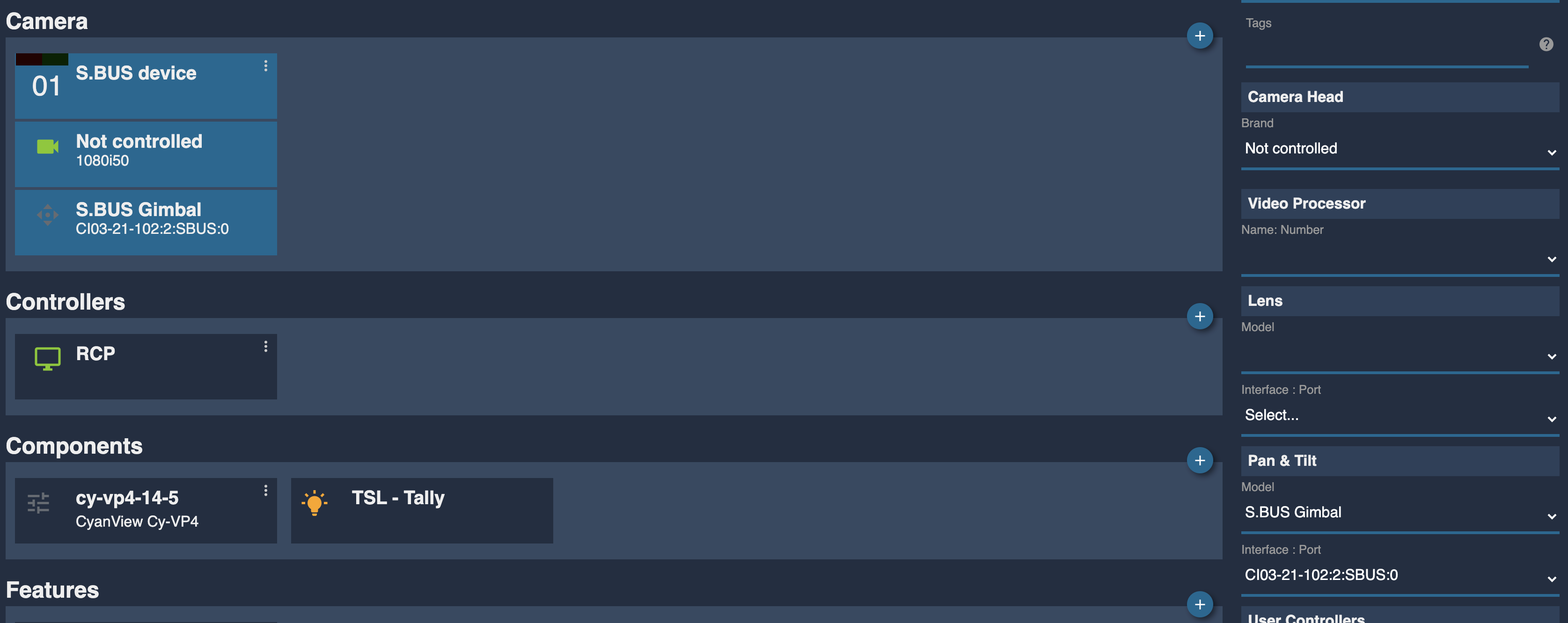
To configure an S.BUS device, first create a camera. In this example, the camera is a Not controlled model, and will only be used to control the S.BUS device
In the Pan & Tilt section, select S.BUS Gimbal as a model, and select the Futaba: S.BUS bus created previously for the Interface: Port
Then, the advanced settings must be activated to configure the S.BUS channels. Advanced settings can be activated by clicking the three dots at the top right part of the Settings

Once the advanced settings are activated, a new field appears in the Pan & Tilt configuration block :
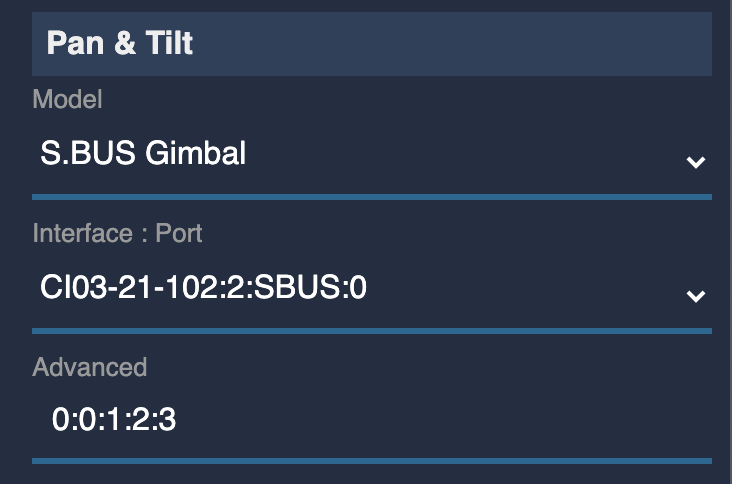
The Advanced field configuration must respect the following format :
pan channel:tilt channel:pan speed channel:tilt speed channel:roll channel:roll speed channel,channel X=channel_x config;channel Y=channel_y config; ...
In the example above, the configuration is :
- pan: Not used (channel 0)
- tilt: Not used (channel 0)
- pan speed: Channel 1
- tilt speed: Channel 2
- roll: Channel 3
- roll speed: Not used.
- No extra channels are configured
Once this configuration is done, the S.BUS device can be controlled via the RCP, in the Lens menus.
Extra channels configuration
Extra channels can be added with fixed analog or digital values. For example, to add an analog value of 1024 (half range) on channel 15 and a digital state 1 on channel 16, the following configuration must be added :
15=A1024;16=D1.
- Analog values are prefixed by A
- Digital values are prefixed by D
The complete settings, with pan / tilt / roll channels would be :
0:0:1:2:3:0,15=A1024;16=D1
Wiring
S-BUS is accessible on PORT2 of RIO and CI0. It is also available on PORT3 of CI0 3Ports versions.
The pinout is :
- HR10A pin 4: SBUS
- HR10A pin 5: Ground
Cable CY-CBL-6P-FAN can be used to connect a S.BUS device to a CI0.
Example with a DJI Ronin-S gimbal
The DJI Ronin-S gimbal can be controlled by S-BUS. The channels for this gimbal are :
- Channel 1: Pan speed
- Channel 2: Tilt speed
- Channel 4: Roll speed
Advanced configuration is then 0:0:1:2:0:4.
S-BUS connector is available on the Focus wheel, with the following pin-out :
- Not connected
- Ground
- Not connected
- S-BUS

Notes :
- The CAN / S-BUS selector on the focus wheel must be set to S-BUS
- Control is not possible when USB is connected (even with a USB charger)